11. 하노이의 탑과 미로게임#
소스코드
아래 내용을 (구글 코랩) 하노이의 탑과 미로게임에서 직접 실행할 수 있다.
주요 내용
for, while 반복문을 이용하여 해결하기 어려운 문제를
재귀 알고리즘으로 상대적으로 훨씬 간단하게 해결하는 예제 두 개를 다룬다.
11.1. 하노이의 탑#
하노이의 탑(Tower of Hanoi) 문제는 세 개의 기둥 중에 하나의 기둥에 쌓여 있는 다양한 크기의 원판들을 다른 기둥으로 옮기는 게임이다. 단, 원판 이동 중에 아래 제한조건들을 반드시 지켜야 한다.
한 번에 한개의 원판만 옮긴다.
큰 원판이 그보다 작은 원판 위에 위치할 수 없다.

<그림 출처: 위키백과: 하노이의 탑>
참고: 일반적으로 원판이 \(n\)개 일 때, \(2^n - 1\)번의 이동으로 원판을 모두 옮길 수 있다. 참고로 64개의 원판을 옮기는 데 총 \(2^{64}-1\) 번 원판을 움직여야 하고, 1초에 하나의 원판을 옮긴다고 가정했을 때 5,849억년 정도 걸린다.
재귀 알고리즘
4개의 원판을 옮겨야 한다고 가정하자. 아래 연속된 그림에서 볼 수 있듯이 3개의 원판을 옮기는 과정을 두 번 반복하면 된다.



위 설명을 임의의 양의 정수 n에 대해 일반화하면 다음과 같다.
n-1개의 원판을 중간 지점의 위치에 옮긴다.가장 큰 원판을 목적지로 옮긴다.
중간 지점에 위치한
n-1개의 원판을 목적지로 옮긴다.
위 재귀 알고리즘의 종료조건은 n=1일 때이며, 이때는 하나의 원판을
목적지로 옮기기만 하면 된다.
이를 코드로 구현하면 다음과 같다.
height: 원판 개수from_pole: 출발 기둥with_pole: 중간 지점 기둥to_pole: 목적지 기둥
def move_tower(height, from_pole, to_pole, with_pole):
if height >= 1:
move_tower(height - 1, from_pole, with_pole, to_pole)
move_disk(from_pole, to_pole) # 탑 원판 옮기기
move_tower(height - 1, with_pole, to_pole, from_pole)
def move_disk(from_p, to_p):
print(f"{from_p}에서 {to_p}로 탑 원판 옮기기")
move_tower(4, "A", "B", "C")
A에서 C로 탑 원판 옮기기
A에서 B로 탑 원판 옮기기
C에서 B로 탑 원판 옮기기
A에서 C로 탑 원판 옮기기
B에서 A로 탑 원판 옮기기
B에서 C로 탑 원판 옮기기
A에서 C로 탑 원판 옮기기
A에서 B로 탑 원판 옮기기
C에서 B로 탑 원판 옮기기
C에서 A로 탑 원판 옮기기
B에서 A로 탑 원판 옮기기
C에서 B로 탑 원판 옮기기
A에서 C로 탑 원판 옮기기
A에서 B로 탑 원판 옮기기
C에서 B로 탑 원판 옮기기
머리와 꼬리
하노이의 탑 알고리즘에서 머리와 꼬리는 다음과 같다.
머리: 바닥에 위치한 원판. 지정된 목적지로 이동하면 끝.
꼬리: 머리를 제외한 나머지 원판으로 이루어진 탑. 따라서 하나의 꼬리에 대한 두 번의 재귀호출이 이뤄짐.
11.2. 미로 탐색#
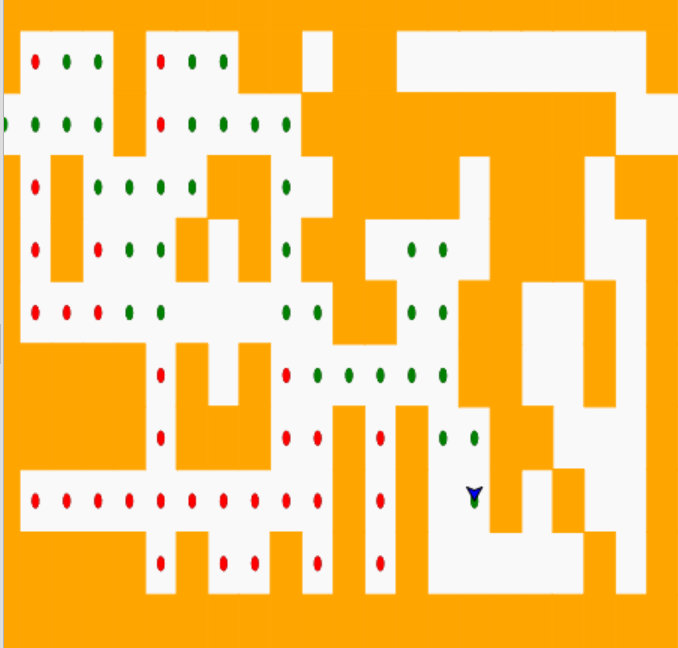
아래 그림은 거북이가 미로를 탈출하기 위해 가능한 모든 경로를 탐색하는 과정을 보여준다.
노랑 벽: 거북이가 통과하지 못하는 벽
형광 점: 탈출 경로
빨강 점: 갔다가 길이 막혀서 되돌아온 경로
미로 설계도
미로 설계도는 덧셈 기호(+)와 공백으로 이루어진 문자열로 주어진다.
아래 설계도는 11개의 행과 22개의 열로 이루어진 2차원 어레이 모양을 갖는 설계도이다.
덧셈 기호(
+): 벽돌을 의미함.공백: 이동 가능 공간을 의미함.
S: 거북이의 초기 위치를 지점함.
maze2 = "++++++++++++++++++++++\n\
+ + ++ ++ +\n\
+ ++++++++++ \n\
+ + ++ ++++ +++ ++\n\
+ + + + ++ +++ +\n\
+ ++ ++ + +\n\
+++++ + + ++ + +\n\
+++++ +++ + + ++ +\n\
+ + + S+ + +\n\
+++++ + + + + + +\n\
++++++++++++++++++++++\n"
즉, 아래와 같이 생긴 미로를 설계한다.
print(maze2)
++++++++++++++++++++++
+ + ++ ++ +
+ ++++++++++
+ + ++ ++++ +++ ++
+ + + + ++ +++ +
+ ++ ++ + +
+++++ + + ++ + +
+++++ +++ + + ++ +
+ + + S+ + +
+++++ + + + + + +
++++++++++++++++++++++
먼저 설계도를 파일로 저장한다.
참고: 이 과정 대신 직접 2차원 리스트로 변환할 수 있다. 하지만 여기서는 파일로 저장한 후에 저장된 설계도 파일을 읽어 2차원 어레이 형식의 설계도를 생성하는 방식을 사용한다.
with open("maze2.txt", "w") as maze2_file:
maze2_file.write(maze2)
미로 시각화: Maze 클래스 활용
거북이 모듈을 이용하여 거북이가 움직일 수 있는 미로를 시각화 한다.
이를 위해 Maze 클래스를 선언하며
미로 그리기, 거북이 이동, 위치 업데이트 하기, 이동경로 기억하기 등의 기능을 추가한다.
__init__()메서드: 미로 설계도 읽어오기. 거북이의 출발위치 확인.draw_maze()메서드: 설계도에 따라 미로 그리기.draw_centered_box()메서드: 미로에 필요한 블록 그리기
update_position()메서드: 지정된 위치로 이동 및 이동경로 표시move_turtle()메서드: 지정된 위치로 이동drop_bread_crumb()메서드: 이동 경로 표시. 색상으로 구분.검정: 지나간 경로(최종적으로 빨강 또는 초록으로 대체됨)
빨강: 막혀서 되돌아간 경로
초록: 탈출 경로
is_exit()메서드: 미로 경계를 벗어나는 지점 여부 확인__getitem__()메서드: 미로 상의 위치 확인용. 2차원 어레이 모양의 리스트에 필요한 인덱스 기능 지원.
import turtle
PART_OF_PATH = "O"
TRIED = "."
OBSTACLE = "+"
DEAD_END = "-"
class Maze:
def __init__(self, maze_filename):
rows_in_maze = 0
columns_in_maze = 0
self.maze_list = []
maze_file = open(maze_filename, "r")
rows_in_maze = 0
for line in maze_file:
row_list = []
col = 0
for ch in line[:-1]:
row_list.append(ch)
if ch == "S":
self.start_row = rows_in_maze
self.start_col = col
col = col + 1
rows_in_maze = rows_in_maze + 1
self.maze_list.append(row_list)
columns_in_maze = len(row_list)
self.rows_in_maze = rows_in_maze
self.columns_in_maze = columns_in_maze
self.x_translate = -columns_in_maze / 2
self.y_translate = rows_in_maze / 2
self.t = turtle.Turtle()
self.t.shape("turtle")
self.wn = turtle.Screen()
self.wn.setworldcoordinates(
-(columns_in_maze - 1) / 2 - 0.5,
-(rows_in_maze - 1) / 2 - 0.5,
(columns_in_maze - 1) / 2 + 0.5,
(rows_in_maze - 1) / 2 + 0.5,
)
def draw_maze(self):
self.t.speed(10)
self.wn.tracer(0)
for y in range(self.rows_in_maze):
for x in range(self.columns_in_maze):
if self.maze_list[y][x] == OBSTACLE:
self.draw_centered_box(
x + self.x_translate, -y + self.y_translate, "orange"
)
self.t.color("black")
self.t.fillcolor("blue")
self.wn.update()
self.wn.tracer(1)
def draw_centered_box(self, x, y, color):
self.t.up()
self.t.goto(x - 0.5, y - 0.5)
self.t.color(color)
self.t.fillcolor(color)
self.t.setheading(90)
self.t.down()
self.t.begin_fill()
for i in range(4):
self.t.forward(1)
self.t.right(90)
self.t.end_fill()
def move_turtle(self, x, y):
self.t.up()
self.t.setheading(self.t.towards(x + self.x_translate, -y + self.y_translate))
self.t.goto(x + self.x_translate, -y + self.y_translate)
def drop_bread_crumb(self, color):
self.t.dot(10, color)
def update_position(self, row, col, val=None):
if val:
self.maze_list[row][col] = val
self.move_turtle(col, row)
if val == PART_OF_PATH:
color = "green"
elif val == OBSTACLE:
color = "red"
elif val == TRIED:
color = "black"
elif val == DEAD_END:
color = "red"
else:
color = None
if color:
self.drop_bread_crumb(color)
def is_exit(self, row, col):
return (
row == 0
or row == self.rows_in_maze - 1
or col == 0
or col == self.columns_in_maze - 1
)
def __getitem__(self, idx):
return self.maze_list[idx]
미로 탐색 알고리즘
미로의 임의의 위치에서 출발하는 거북이가 탈출 경로를 탐색하는 알고리즘은 다음과 같다.
참고: or 부울 연산자의 기능에 주의해야 한다.
True or B:B를 확인하지 않고True로 처리됨False or B:B를 확인함.
def search_from(maze, start_row, start_column):
# 지정된 위치로 이동 및 상태 업데이트
maze.update_position(start_row, start_column)
# 종료 조건
# 1. 벽에 막히는 경우
if maze[start_row][start_column] == OBSTACLE:
return False
# 2. 이미 탐색한 경로인 경우
if (
maze[start_row][start_column] == TRIED
or maze[start_row][start_column] == DEAD_END
):
return False
# 3. 탈출구를 찾은 경우
if maze.is_exit(start_row, start_column):
maze.update_position(start_row, start_column, PART_OF_PATH)
return True
# 종료 조건이 아닌 경우: 해당 위치를 `TRIED`로 표시
maze.update_position(start_row, start_column, TRIED)
# 이후 북, 남, 서, 동 방향의 순서로 모든 가능성을 재귀적으로 탐색
# 주의: or 연산자의 기능에 유의할 것.
found = (
search_from(maze, start_row - 1, start_column)
or search_from(maze, start_row + 1, start_column)
or search_from(maze, start_row, start_column - 1)
or search_from(maze, start_row, start_column + 1)
)
# 모든 가능성이 없을 때까지 이동한 후 두 가지 가능성 존재
# 1. 탈출구를 찾은 경우
if found:
# 탈출구를 찾은 다음 되돌아가지 않도록 하기 위해서는 아래코드 실행
# return True
maze.update_position(start_row, start_column, PART_OF_PATH)
# 2. 왔던 길로 되돌아가야 하는 경우
else:
maze.update_position(start_row, start_column, DEAD_END)
return found
이제 아래 코드를 실행하면 최종적으로 앞서 본 미로그림이 완성된다.
참고: 온라인 상에서 거북이 코드실행은 Trinket: 미로 탐색에서 확인할 수 있다. 아니면 개인 컴퓨터에서 파이썬을 설치한 후 실행하면 된다. 구글 코랩에서는 기본적으로 지원되지 않는다.
my_maze = Maze("maze2.txt")
my_maze.draw_maze()
my_maze.update_position(my_maze.start_row, my_maze.start_col)
search_from(my_maze, my_maze.start_row, my_maze.start_col)
머리와 꼬리
미로 탐색 알고리즘의 머리와 꼬리는 다음과 같다.
머리: 이동 후 벽에 막히거나 탈출구에 위치한 경우
꼬리: 북, 남, 서, 동으로 이동한 후 동일한 탐색 과정 반복. 즉 4 개의 꼬리 사용.